lambda
Butterfly Effect and Hawkmoth Effect (I)
Introduction
Here comes a 2-posts series of exploration on chaos. This is the first post. The second post can be found here: Butterfly & Hawkmoth -Part 2.
Motivation
The interrogation of a deterministic physical view can be conducted in different ways. Despite the underlying Principle of Uncertainty rooted in quantum mechanics, even in a Newtonian playground, people have long realized the limitation of predictability for dynamic systems.
The limitation is termed under various names, such as Laplace Demon (Laplace), Three Body Dilemma (Henri Poincaré), Butterfly Effect (Lorenz), etc.. The last one is in fact over exaggerating although it successfully catched the public’s eyes(See Orrell, Smith, etc. 2001 and Stephen Wolfram 2002).
This post tries to illustrate the idea of the limitation with numerical simulations(in Part I), followed by a discussion of its effects on the unstable foundation of “Climate Science“(in Part II).
Toy Model – the Lorenz System
The Lorenz System is selected here for its rich exploration heritage. It is derived from the Oberbeck-Boussinesq Approximation to the equations describing fluid circulation in a shallow layer of fluid, heated uniformly from below and cooled uniformly from above. This fluid circulation is known as Rayleigh-Bénard Convection. The fluid is assumed to circulate in two dimensions (vertical and horizontal) with periodic rectangular boundary conditions(wikipedia). The system is described as follows:
Numerical Simulation
The equations can not be analytically integrated. A numerical simulator using Mathematica is coded as follows:
LorenzSystemSolution[x0_,y0_,z0_,a_;3,b_:26.5,c_:1]:=
Block[{x,y,z,t,tend,eq,init,xs,ys,zs},
tend = 500;
eq = { x'[t] == a (y[t] - x[t]),
y'[t] == x[t] (b - z[t]) - y[t],
z'[t] == x[t] y[t] - c z[t]};
init = {x[0] == x0, y[0] == y0, z[0] == z0};
{xs, ys, zs} = NDSolveValue[{eq , init}, {x, y, z}, {t, 0, tend},
MaxSteps -> \[Infinity]];
Table[{xs[t], ys[t], zs[t]}, {t, 0, tend}]]
I set the default parameters to a=3, b=26.5, c=1. There are many works considering the parameter settings and properties of the system. For those who are interested, Hirsch, Smale & Devaney, 2003 gives good supplements.
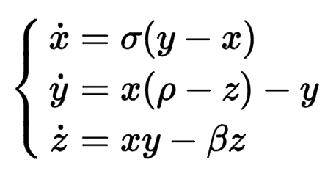
Given the initial condition, I can draw the trajectory of the dynamical system. For instance:
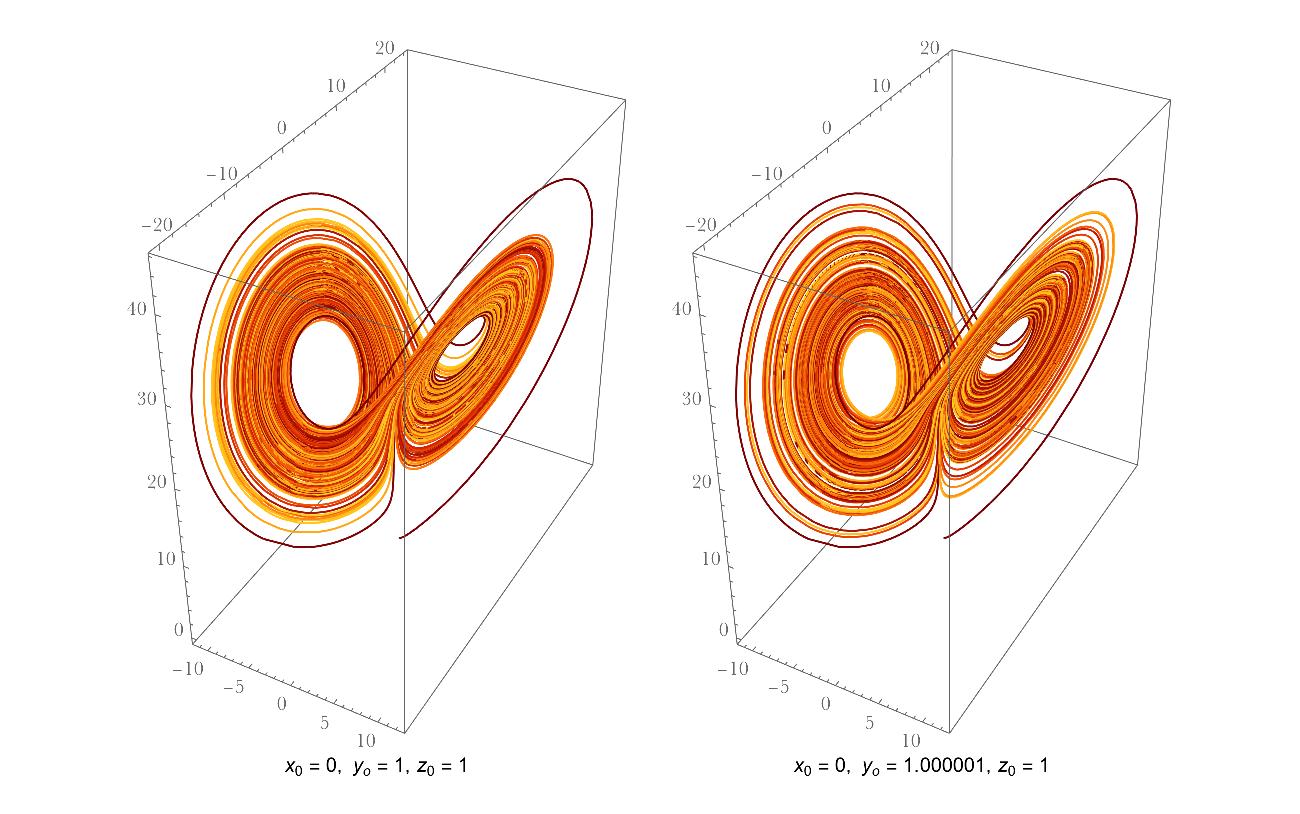
The initial x and z are identical for the two realizations, y differs slightly by 0.000001. It seems that the two trajectories are generally indistinguishable. But, if I compare the Euclidean Distance between the trajectories, for different magnitude of pertubations, the result is a little bit surprising:
Purtubations of different magnitude were added to initial y. For pertubations larger than 10^-16, we don’t need to wait too long before the divergence of the two trajectories. Similar things happen by tuning initial x or z. They diverge, then they never come back. The initial closeness does not guarantee likeliness forever. Just as marriage.
The divergent time here did not exceed 40 steps. It is reported that if we can initialize the Lorenz System with 4180 digit multiple precision, we can reach reliable simulation for 100000 steps, according to a 1200 CPU parallel simulation experiment(Shijun Liao, etc.. 2013).
Once the “realistic” and “simulated” trajectories start to diverge, the following realizations are evolving from distinct initials. This makes a determinisitic comparison meaningless. But does it mean that they provide no information?
What could Not be Achieved, Here Comes to Pass
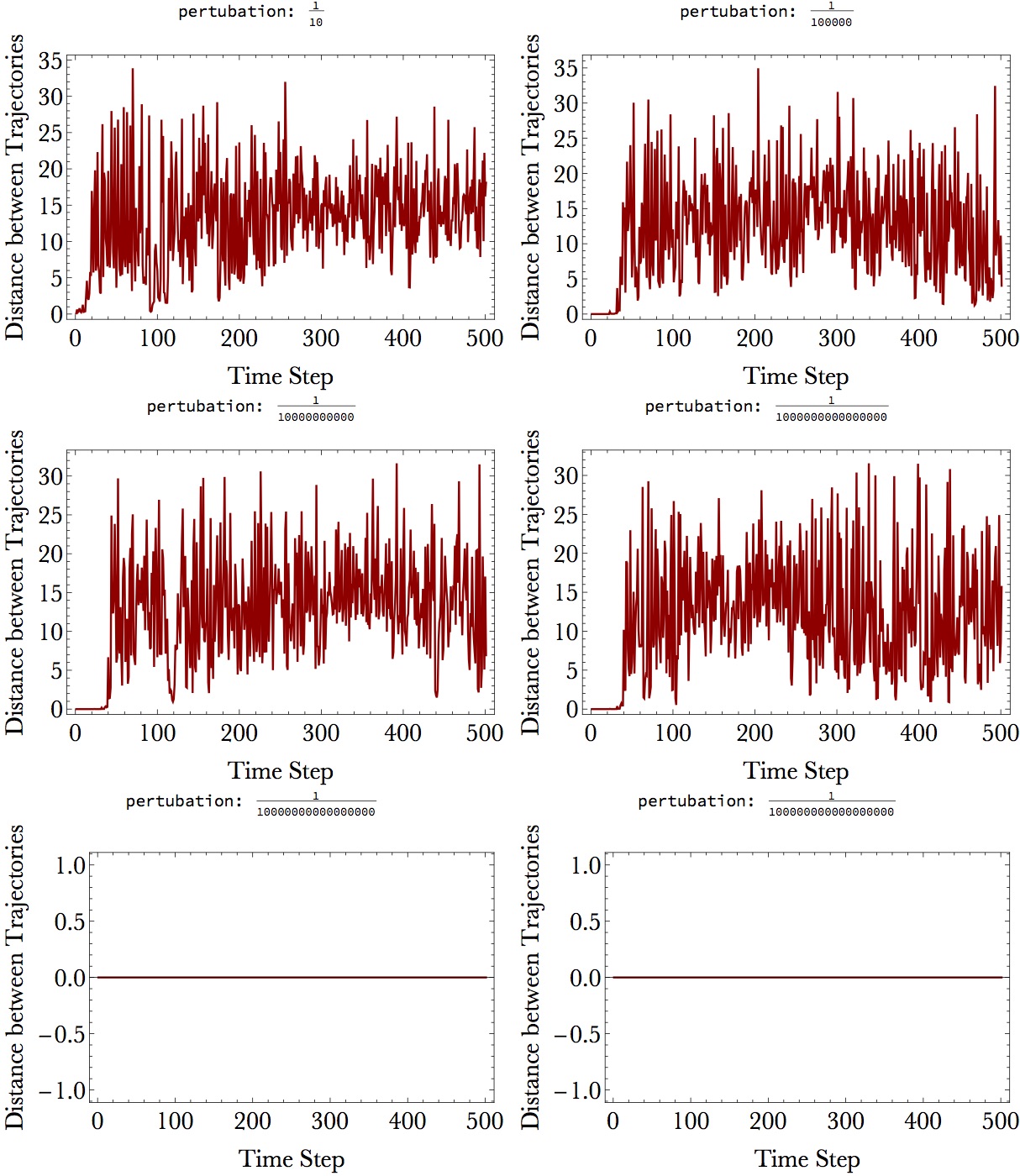
The general pattern of the trajectories above are quite alike although they are not close enough in the Euclidean Distance sense. A mathematical translation for the likeliness is that their temporal average location should be close. Below I do a uniform convolution over the trajectories to compare the temporal mean of them.
As the temporal resolution expands, the two trajectories are becoming more and more close in L2 sense. The local maximum divergence is due to the transition of phases(shown as two evolving centers). So, we can say that, in the long term mean sense, the system is predictable.
What no-one could Describe, Is Here Accomplished
It is natural to measure our understanding about a target variable/phenomenon with probability distribution. Even that we can not have a determinisitic estimation of initials, we do have a probabilistic estimation of it. While the determinisitc result can be proven to be false easily, the probabilistic one is always logically right since it’s a measuring of our mind rather than nature. We can feed the initial distribution to the dynamic system to reach the probability distribution of the trajectory. This is the idea behind ensemble forecast.
Assume that there is God in the Lorenz System. “He” is omniscient in observation, dynamical understanding and computing capacity(Roman, etc.. 2014). “He” knows that the system starts from (x=0,y=1,z=1) and follows the differential equation set perfectly. He can do simulation arbitrarily fast.
I, as the imperfect imitation of him, try to simulate the system with my insuffient knowledge of the initial condition. Since I know my limitations, I decide to take the probabilisitc strategy. My idea is to sample from my probability distribution of the initials and use my whole ensemble trajectories to infer the system’s characteristics.
To start, assume that my prior probability estimation of the initial is:
P(X=0)=1
P(Z=1)=1
and Y is uniformly distributed in an interval of (-10^-5,10^-5).
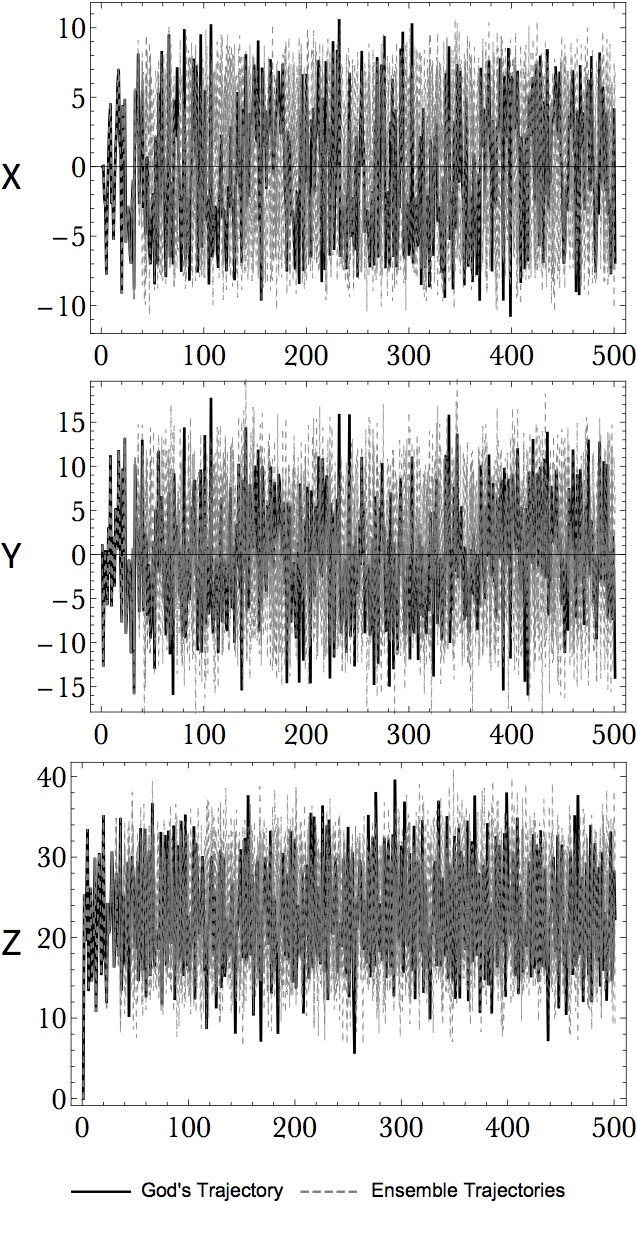
150 samples were generated and evolved for 500 steps, along with the God’s trajectory.
Below I show the projected trajectories on the coordinate planes. Only part of the ensemble members were drawn for clarity.
A very natural question arises that Could Ensemble Forecasts Provide Better Prediction in Deterministic Sense? A general answer to this question is Yes, using ensemble mean:
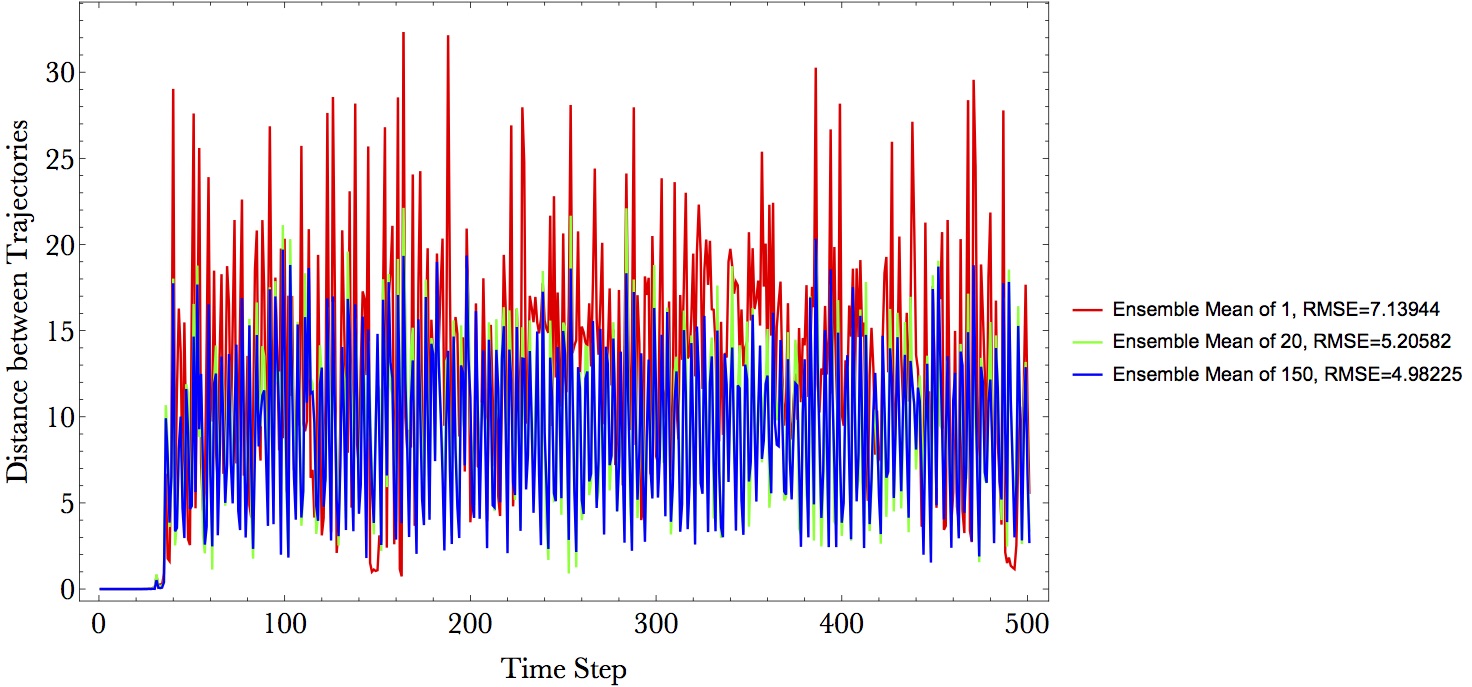
The decease of RMSE is puerly due to statistics rather than any physical improvements. A more detailed exploration will link it to the Law of Large Numbers. We are still faced with the trajectory divergence problem, although the divergence is a liitle bit more converged through averaging ensemble members.
What’s Next
The Lorenz System above is a pretty simple dynamic system. The Climate System is much more complicated that involves the dynamics and interaction of atmosphere, ocean and landsurface. Also, the climate system is an open system and recieves the forcing from out space and inner geological transitions. However, for certain spatial temporal scale, they are comparable. I will talk about the relevations gained from the comparison in the following poster.